Robobo consta de una base móvil a la que se le acopla un Smartphone con el que se conecta de forma inalámbrica. La base es el cuerpo, el esqueleto y el músculo de Robobo, mientras que el smartphone es su cerebro, y también sus sentidos (vista, oído, tacto).
![]()
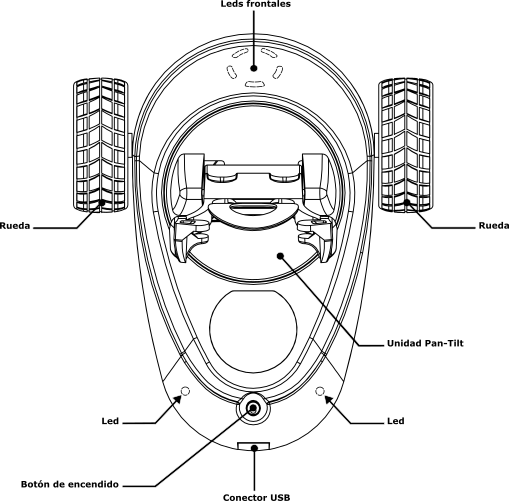
Elementos de la base robótica
La base robótica contiene los siguientes elementos básicos, mostrados en las siguientes imágenes:
- 2 ruedas motrices.
- 1 unidad PAN-TILT, donde se acopla el Smartphone.
- 5 leds frontales.
- 2 leds traseros.
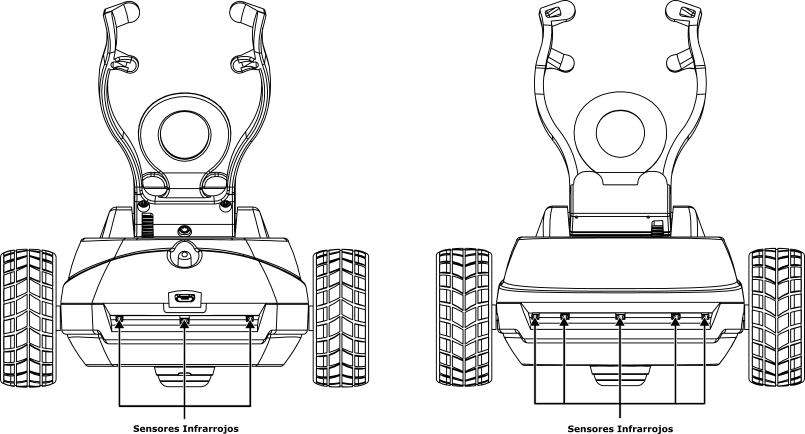
- 5 sensores infrarrojo delanteros.
- 3 sensores infrarrojo traseros.
- 1 conector micro USB (tipo B).
- 1 botón de encendido.
Los Leds de la base robótica se iluminan en función del estado de la misma. Su significado es el siguiente:
Estado de la base Robobo LED Color
Encendida sin conexión al Smartphone 5 Leds frontales Rojo
Encendida con conexión al Smartphone 5 Leds frontales Azul
Encendida con conexión al Smartphone y a Scratch 5 Leds frontales Verde
Modo sleep Led trasero izquierdo Rojo
Batería baja 5 Leds frontales Rojo intermitente
Cargando (encendido) 5 Leds frontales Se encienden secuencialmente en color azul en sentido horario
Modo Bootloader (preparado para la actualización de firmware) Led trasero izquierdo Azul intermitente
Actualizando firmware Led trasero izquierdo Rojo intermitente rápido
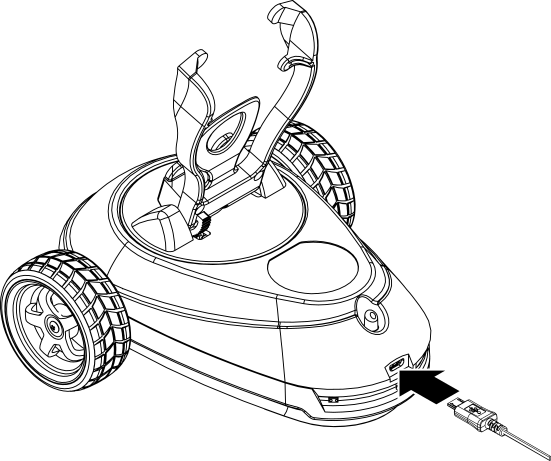
Carga de la batería
Antes de utilizar la base robótica por primera vez, o si no ha utilizado la batería durante mucho tiempo, se deberá cargar la batería.
Para ello, conecte el extremo del cable proporcionado con el conector micro USB (tipo B) a la clavija multifunción o puerto de carga de la base robótica (véase la figura abajo), y después conecte el extremo USB (tipo A) a un adaptador de corriente USB (máximo 2A).
Si conecta el cable en forma incorrecta, podría provocar daños serios a la base. La garantía no cubre ningún daño provocado por el mal uso.
Después de cargar por completo la base robótica, desconéctela de la alimentación. Primero desconecte el cable microUSB de la base, y luego de la toma eléctrica.
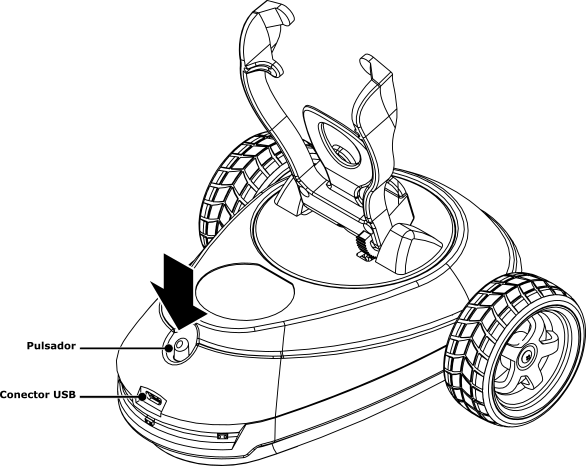
Encendido y apagado de la base robótica
Para encender la base robótica, colóquela sobre una superficie plana y libre de obstáculos. Pulse el botón situado en la parte posterior, como se muestra en la siguiente imagen:
Durante el encendido, la base robótica puede realizar un movimiento de calibrado de la unidad pan-tilt, que girará en torno a su eje tal y como se indica en la siguiente imagen. No obstruya ni toque la unidad pan-tilt hasta que finalice este movimiento.
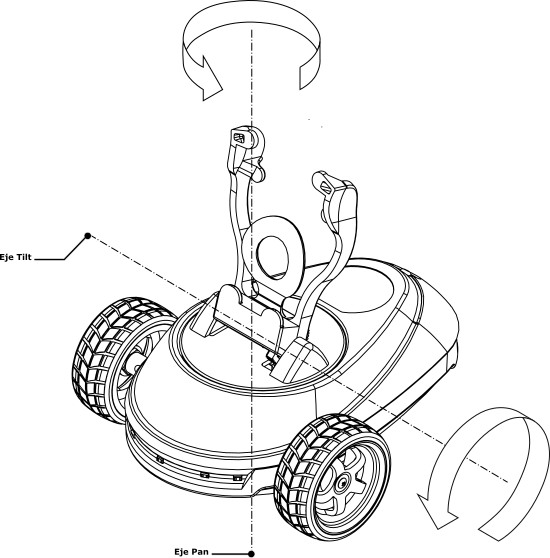
Una vez finalizado el movimiento de calibrado del pan-tilt, la base robótica estará preparada para su uso.
Para apagar la base, simplemente pulsa el botón de encendido de la parte posterior. Esto no hace que se pliegue el soporte del móvil, para hacerlo debes utilizar la app Robobo.
La información sobre cómo conectar el Smartphone con la base y cómo utilizar ambos se puede consultar en la página de la aplicación móvil y en la página de configuración inicial de Robobo.