Modelos de simulación
Hemos desarrollado modelos de simulación de Robobo que facilitan la realización iniciales de programas. En concreto, existen 3 modelos para 3 simuladores, en función de su complejidad:
- Scratch 3: para usuarios de nivel inicial, recomendamos usar nuestro simulador basado en Unity, que puedes encontrar aquí (en inglés):
- Python: los programadores de nivel intermedio podrían usar el simulador basado en Unity con Python, y también CoppeliaSim, que proporciona un mayor grado de realismo:
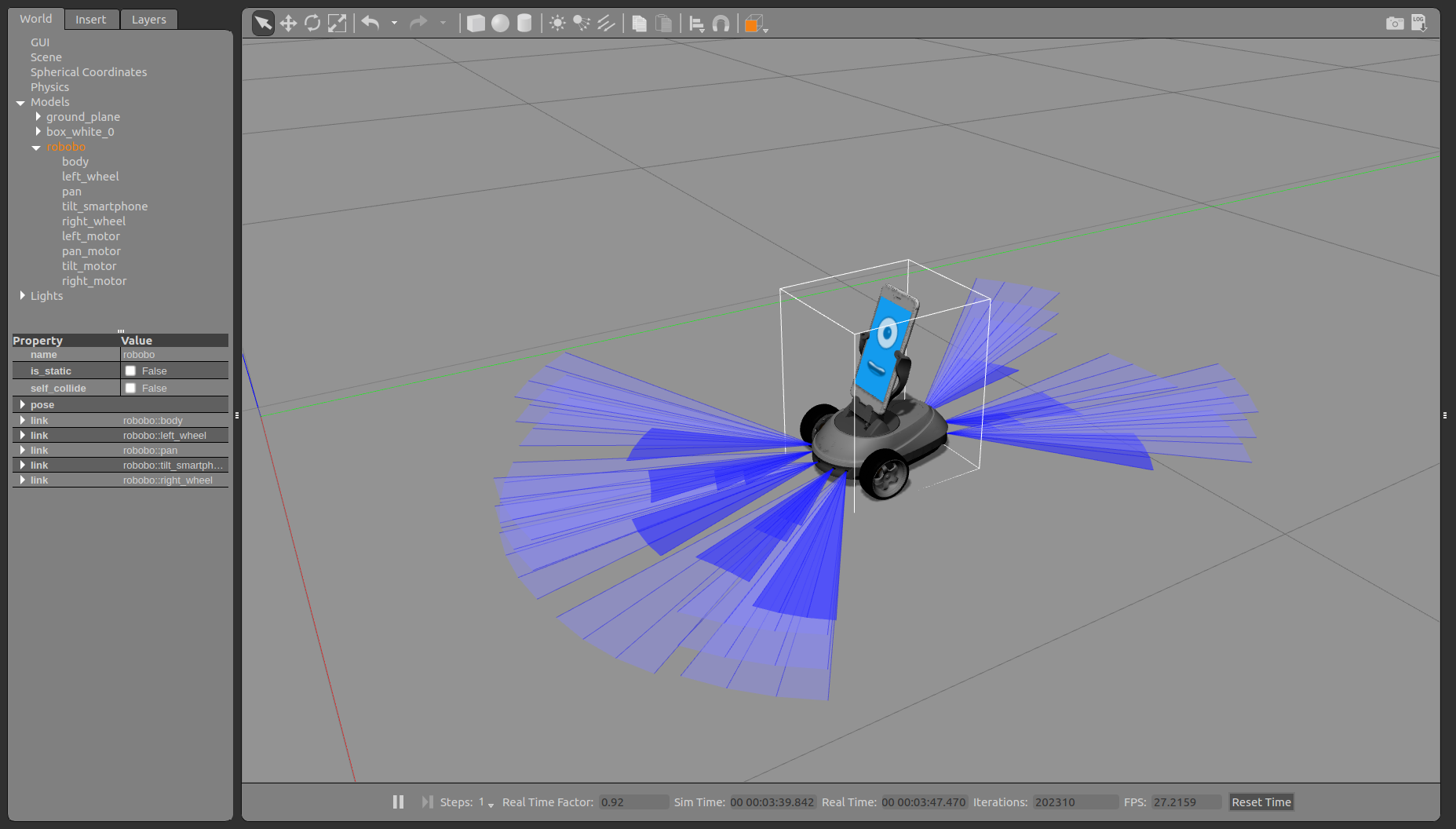
- ROS: para usuarios avanzados tenemos un modelo de Robobo compatible con Gazebo y ROS1: