Robobo consists of a mobile base that is coupled with a Smartphone with which it connects wirelessly. The base is the body, the skeleton and the muscle of Robobo, while the smartphone is its brain, and also its senses (sight, hearing, touch).
![]()
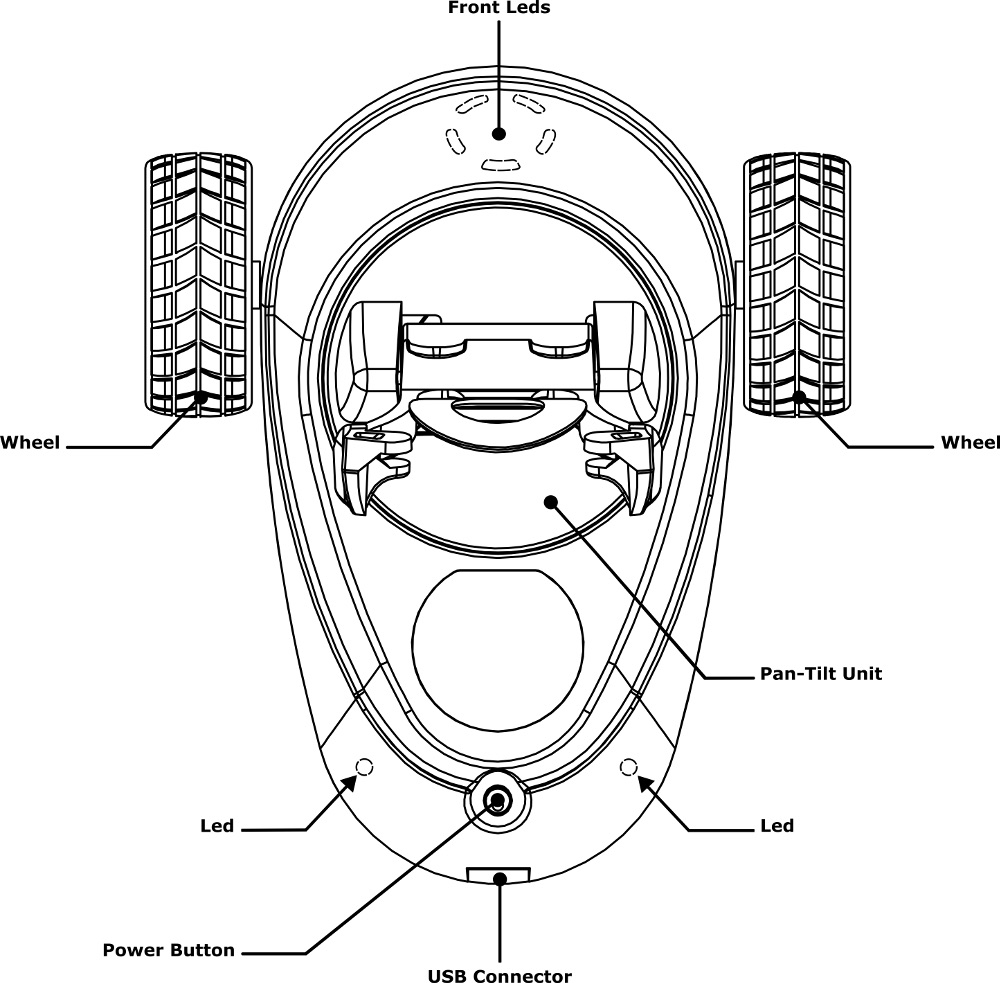
ROBOTIC BASE ELEMENTS
The robotic base contains the following basic elements, shown in the following images:
- 2 driving wheels.
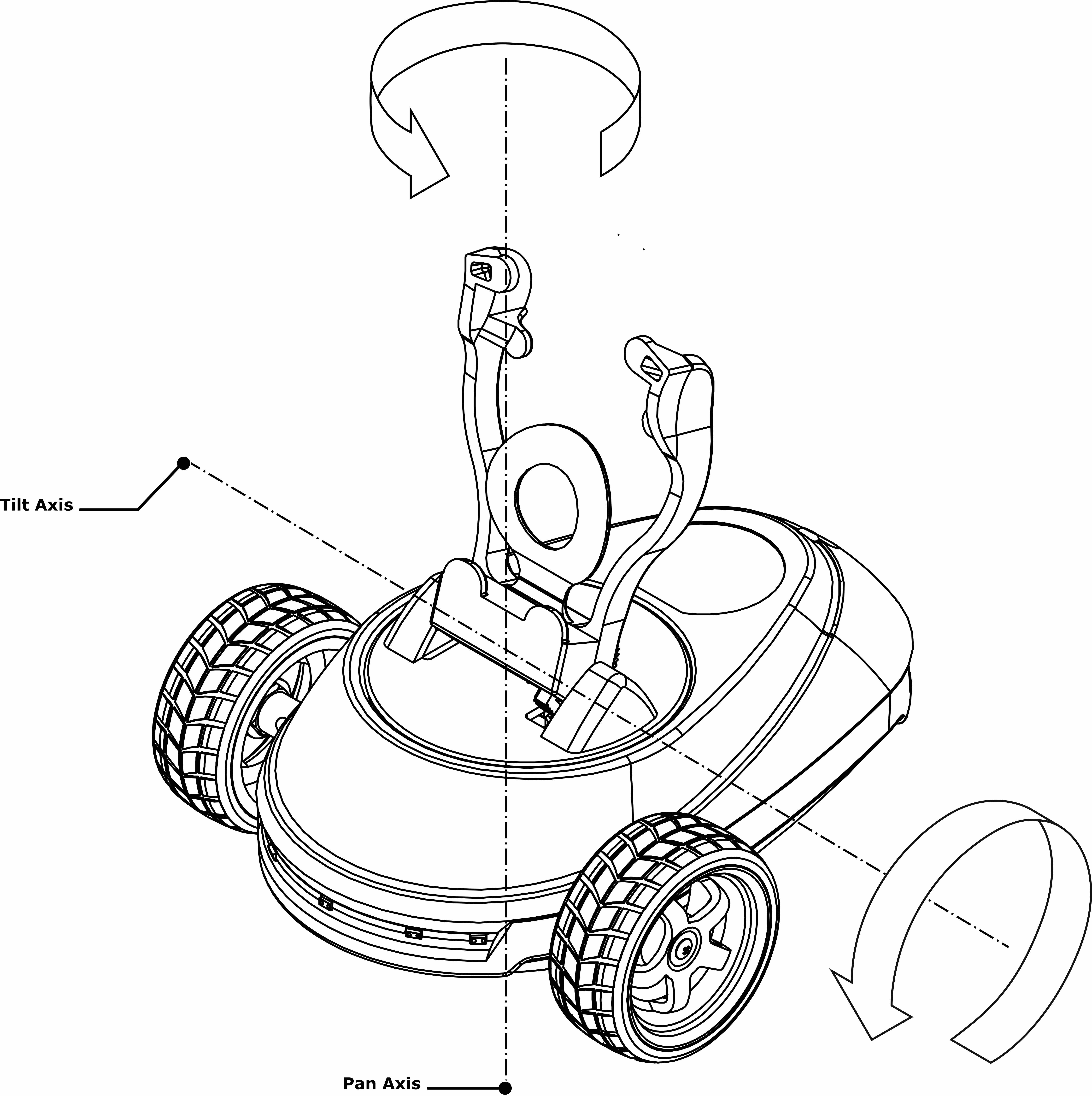
- 1 PAN-TILT unit, where the Smartphone is attached.
- 5 frontal leds.
- 2 rear leds.
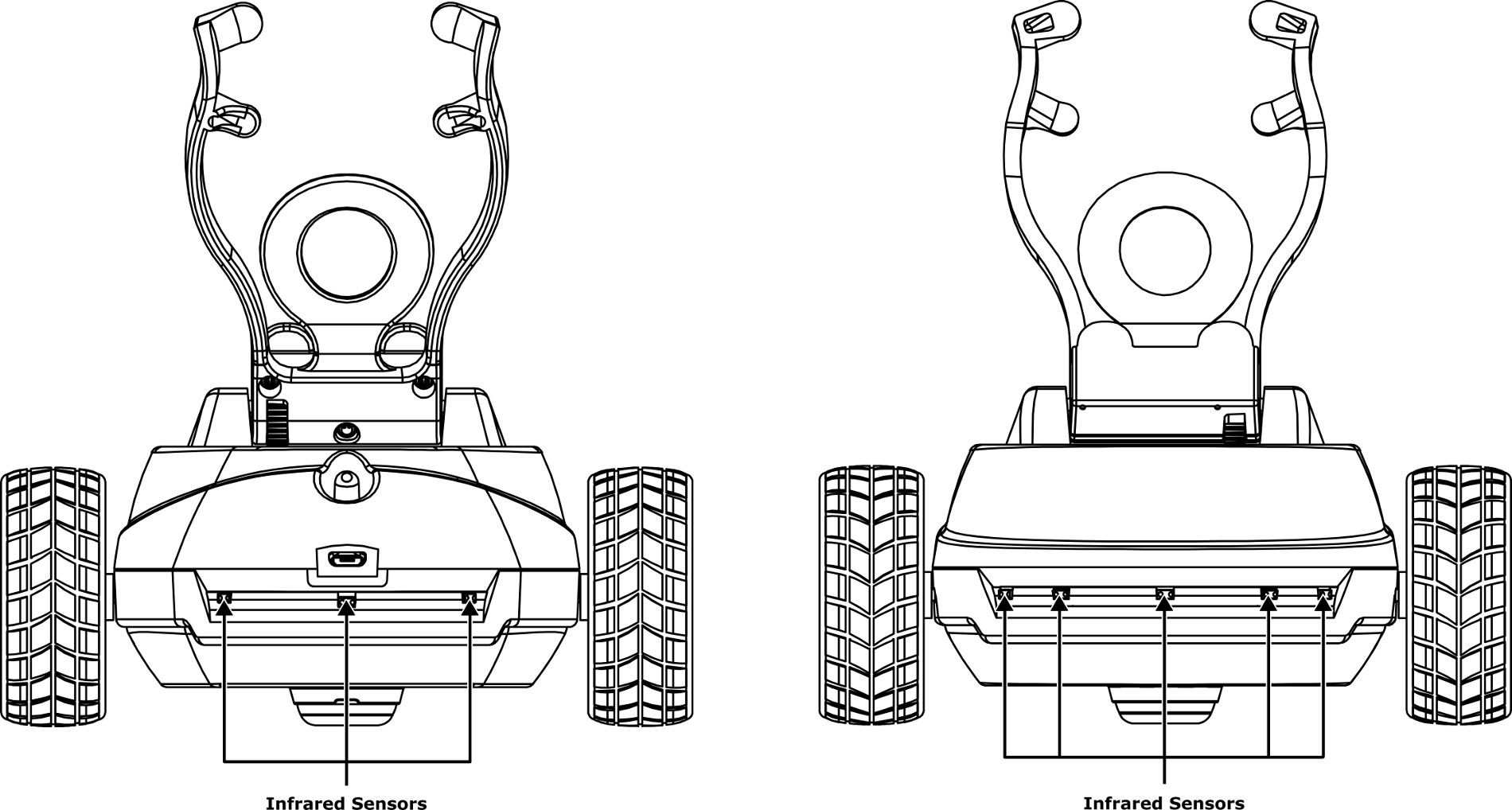
- 5 front infrared sensors.
- 3 rear infrared sensors.
- 1 micro USB connector (type B).
- 1 power button.
The LEDs of the robotic base are illuminated depending on the state of the same. Its meaning is the following:
Robobo base status LED Color
Switched on disconnected from the Smartphone 5 front leds Red
Switched on connected to the Smartphone 5 front leds Blue
Switched on connected to the Smartphone and ScratchX 5 front leds Green
Sleep mode Left back led Red
Low battery 5 front leds Flashing red
Charging 5 front leds It turns on sequentially clockwise in blue color
Bootloader mode (prepared for firmware update) Left back led Flashing red
Updating firmware Left back led Fast flashing red
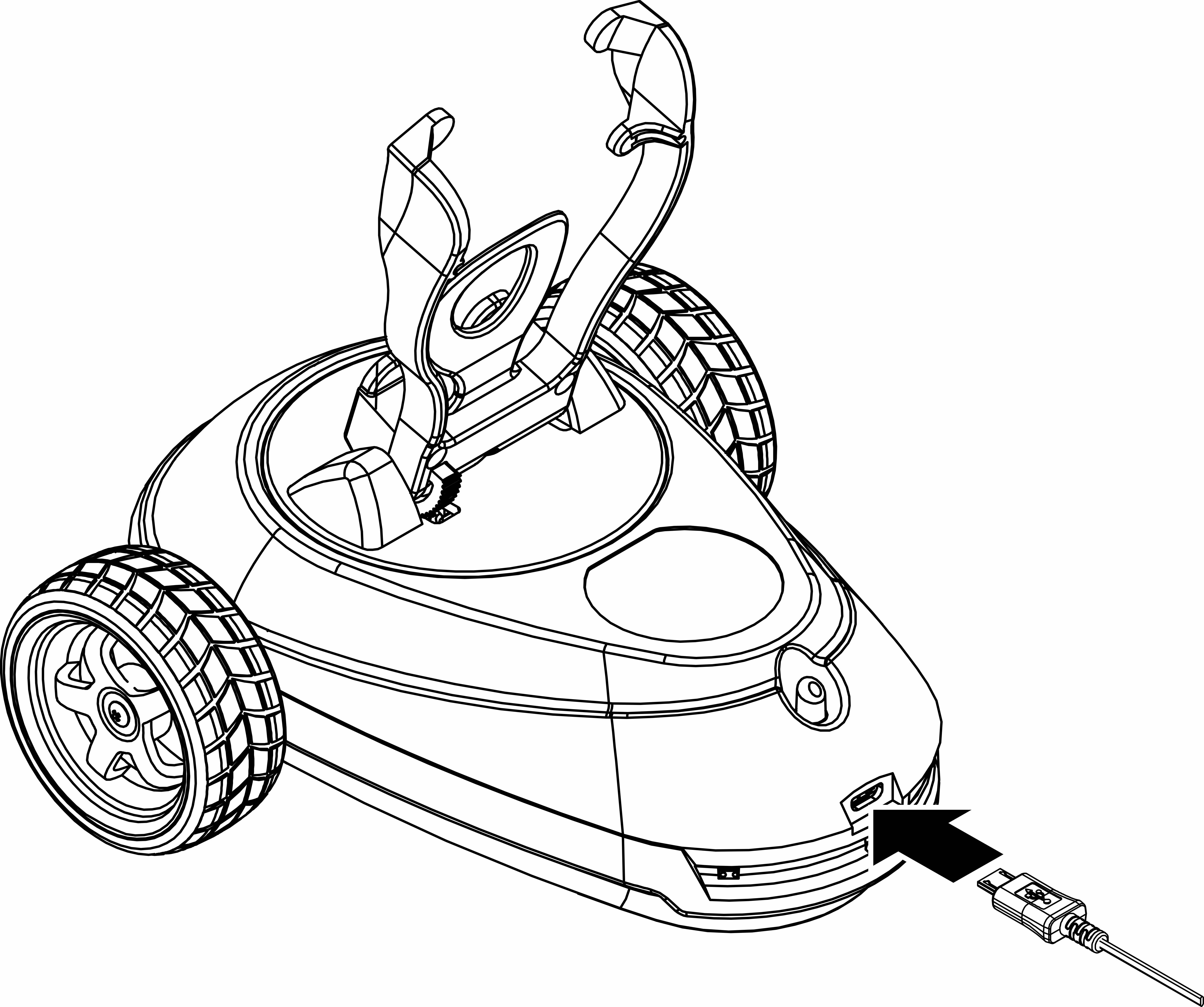
BATTERY CHARGE
Before using the robotic base for the first time, or if you have not used the battery for a long time, the battery should be charged.
To do this, connect the end of the cable provided with the micro USB connector (type B) to the multifunction plug or charging port of the robotic base (see figure below), and then connect the USB connector (type A) to an USB current adapter (maximum 2A).
If you connect the cable incorrectly, it could cause serious damage to the base. The warranty does not cover any damage caused by misuse.
After fully charging the robotic base, disconnect it from the power supply. First disconnect the microUSB cable from the base, and then from the electrical network.
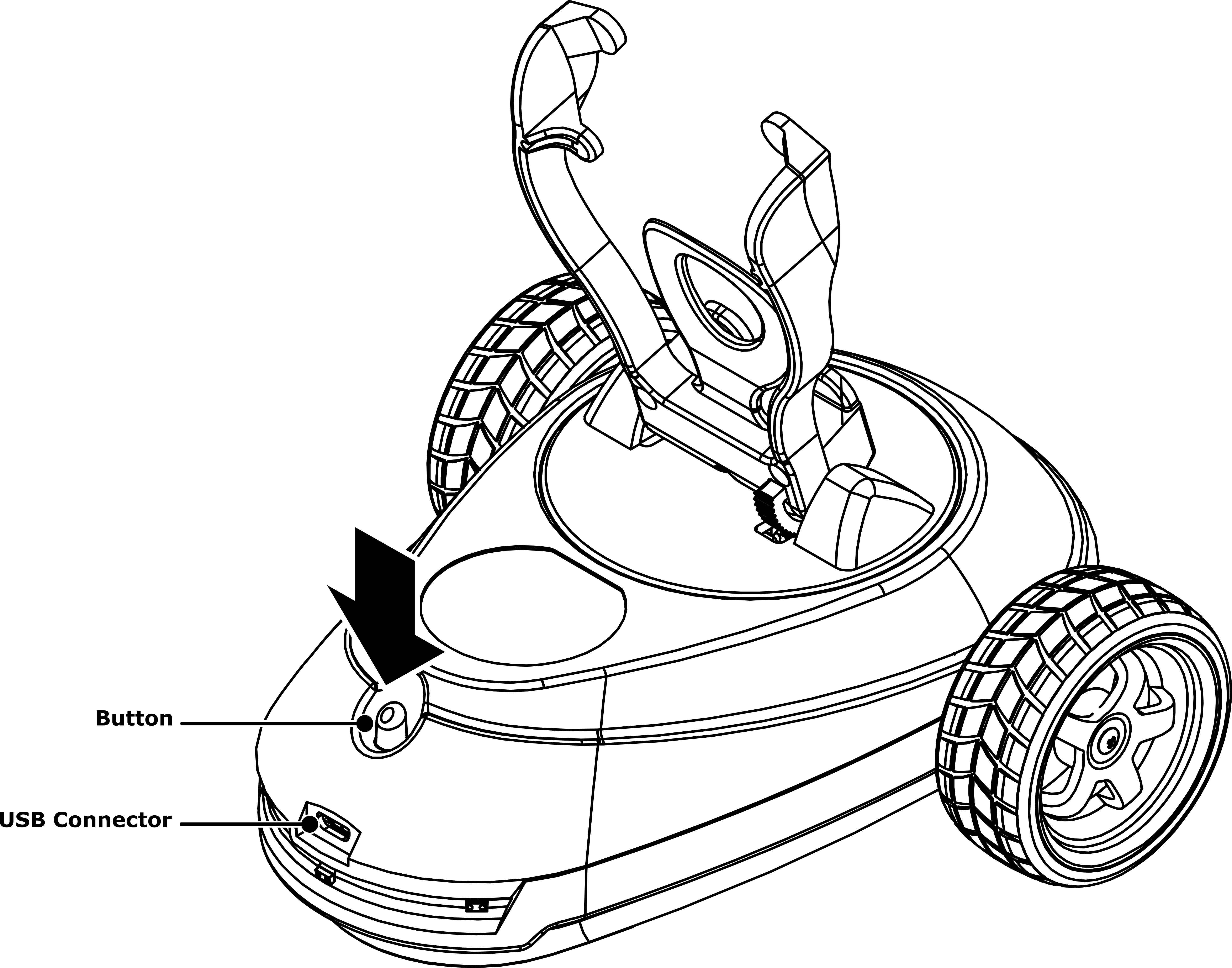
TURNING ON AND OFF THE ROBOTIC BASE
To turn on the robotic base, place it on a flat surface free of obstacles. Press the button located on the back, as shown in the following image:
During the ignition, the robotic base can perform a calibration movement of the pan-tilt unit, which will rotate around its axis as indicated in the following image. Do not obstruct or touch the pan-tilt unit until this movement is completed.
Once the pan-tilt calibration movement has been completed, the robotic base will be ready for use.
To turn the base off, simply click on the on/off button of the back. Turning off the base does not fold the Smartphone holder. To do it, you have to use the Robobo app.
Information on how to connect the Smartphone to the base and how to use both can be found on the Robobo app user guide and on the initial configuration page.